Congestion Impacts Reduction via CAV-in-the-loop Lagrangian Energy Smoothing
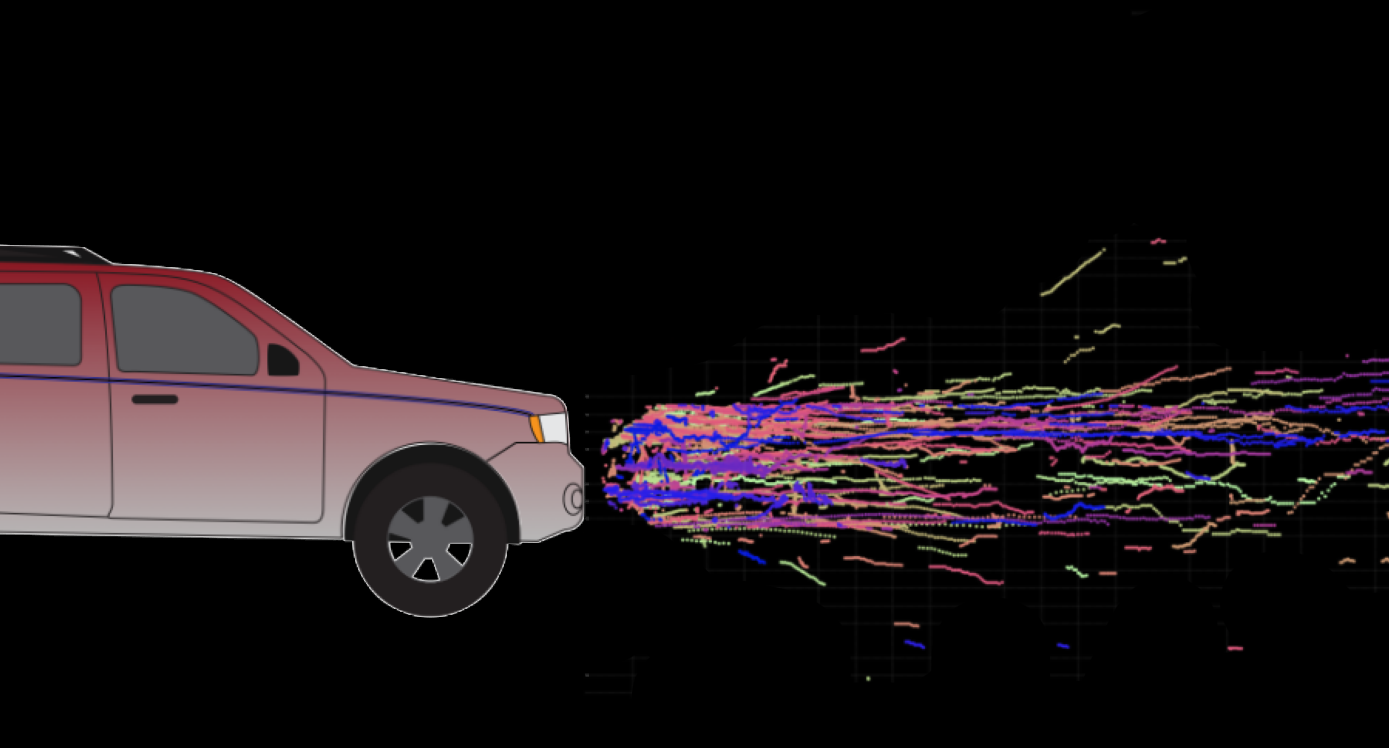
The Congestion Impacts Reduction via CAV-in-the-loop Lagrangian Energy Smoothing (CIRCLES) project aims to reduce instabilities in traffic flow, called "phantom jams," that cause congestion and wasted energy. If you have ever encountered a temporary traffic jam for no apparent reason, this might have been a phantom jam that occurred naturally because of human driving behavior. The ambitious goals of the CIRCLES project is being achieved through a combination of computational development, vehicle technology deployment, and highway infrastructure construction. As a part of CIRCLES project, I am developing a data-driven human driving model to study how humans reacts to various traffic events in an urban traffic. Checkout Strym python package that provides tools for decoding and analysis of vehicular CAN data collected from ACC vehicles in Arizona and Tennessee. The data-driven human driving model will be used to develop and validate autonomous vehicle control algorithm in the simulation followed by the field experiment to meeting a number of traffic optimization objective.
Optimized Quantum Receiver Design
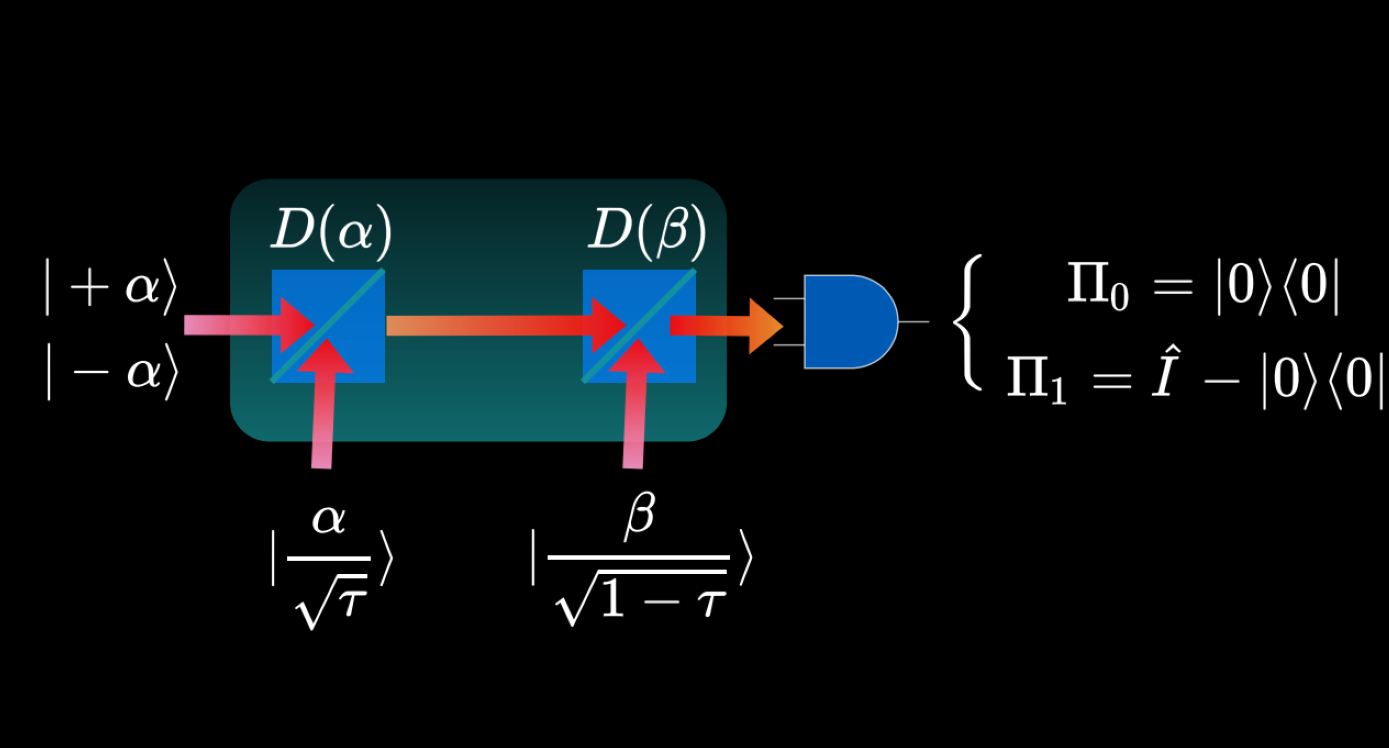
An important problem in quantum information theory is finding the best possible quantum receiver for optical communication channel employing suitable codewords, receiver design, and constellation optimization techniques. Depending on the objective such as minimziing error probability, maximizing mutual information, etc., and the way signals are encoded, quantum receiver needs to be designed differently. As a part of this project, I am developing receiver design in theory that is optimized for given modulation techniques under a number of optical and evironmental imperfections. Applications of such receiver design includes deep-space communication, secure communication, and data compression using free-space optical communication channel.
CAT Vehicle Testbed for Autonomous Vehicle Applications
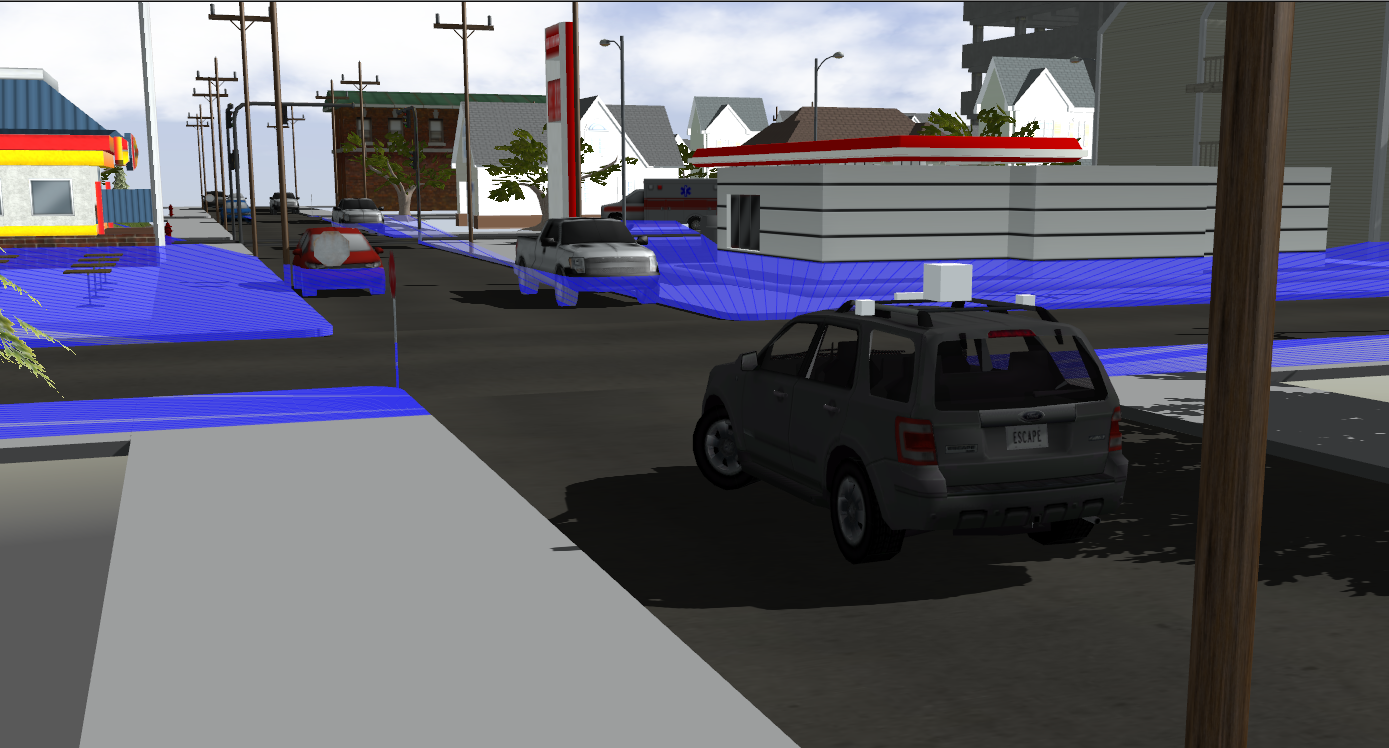
The CAT Vehicle Testbed is a full sized Ford Escape supplemented by a ROS-based simulation platform which is available for control via ROS messaging. It allows researchers to develop novel control and perception application for connected-and-autonomous vehicle in the simulation which is directly transferable to ROS-based autonomous vehicles. Checkout the GitHub repository for this project at GitHub.
Traffic Control via Single Autonomous Vehicle: Experimental Demonstration
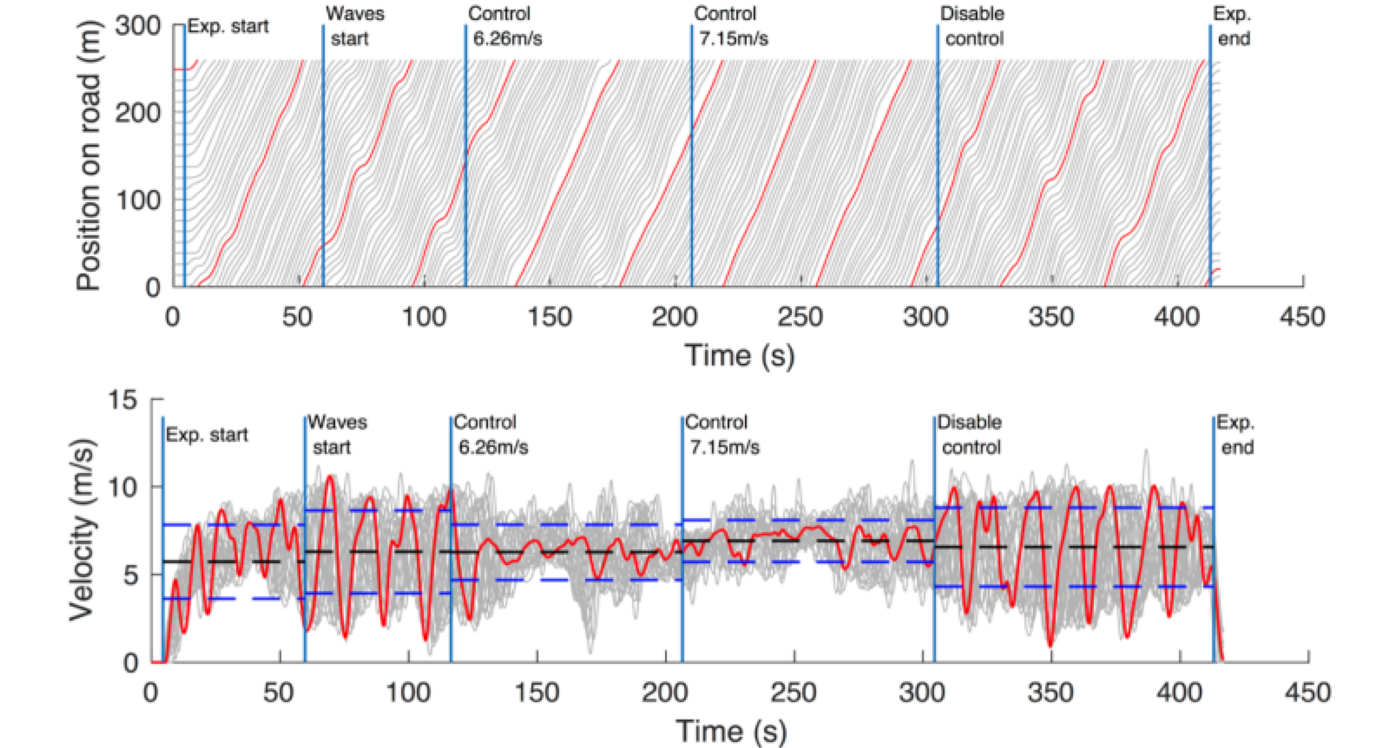
In congested traffic, minor disturbances or fluctuations in the velocity of a single vehicle may induce dynamically evolving traffic instabilities and cause phantom jams. Through simulation and field experiment, we demonstrated that through the control of a small number (e.g., 1-5%) of autonomous vehicles (AVs), it is possible to dampen the phantom jams and in some cases completely remove them from the entire traffic stream. In the summer of 2016 we designed the autonomous vehicular control called Followerstoppe to experimentally demonstrate the ability of a single AV in a stream of 21 other human-piloted vehicles to dampen traffic waves that naturally occur due to human driving behavior. For this experiment, the same circular ring-road setup was selected as in the experiments by Sugiyama, et al. The entire experiment was recorded by a 360-degree panoramic camera at the center of the ring road. The results of the experiment demonstrated that not only is the AV able to dampen the traffic waves, but also has a significant effect on the performance of all of the vehicles (including the human-piloted vehicles) on the road.
